


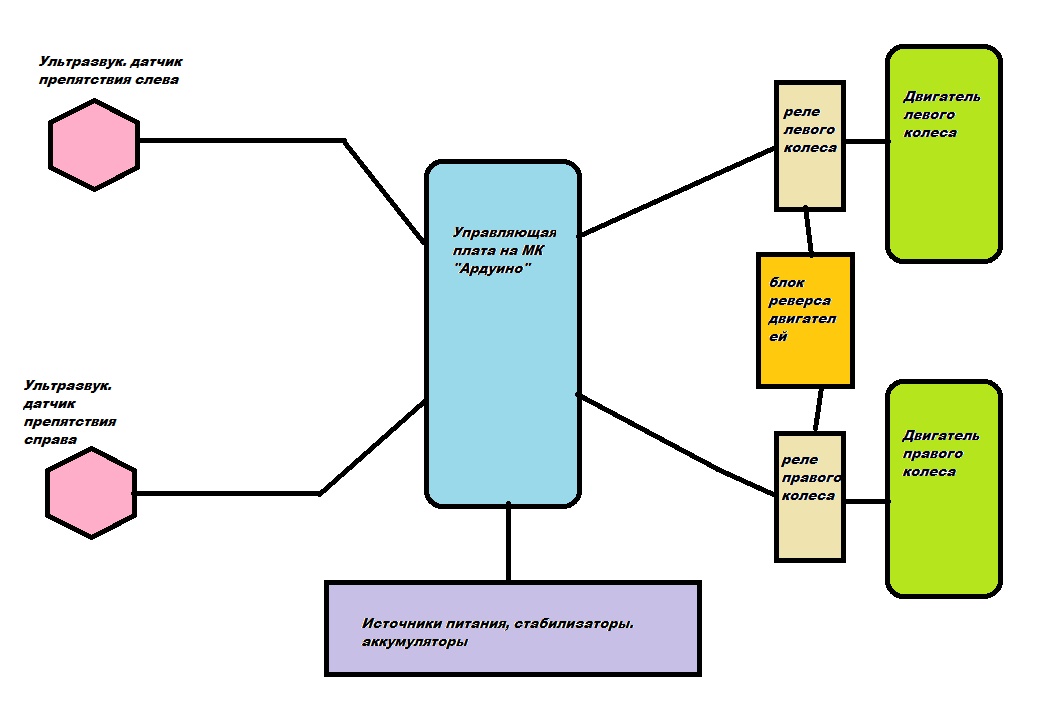
Приступим к описанию и созданию управляющей части проекта (электроника). Чтобы Робот знал что? и где? и куда? ему , конечно, не обойтись без датчиков. Для начала стоит задача объезда каких-либо препятствий на своем пути, значит нужна схема управления , которая может контролировать состояние датчиков и управлят приводами-колесами тележки. Основное требование дешевизна реализации и еще требование на будущее - схема должна быть легкоизменяемой, гибкой. Про задатки искусственного интеллекта пока не говорим! :) Тупо отъездаем от препятсвия / поворачиваемся и движемся далее. Все! Наиболее подходящая схема для требований это современные микрокконтроллеры, которые не требуют особой "обвязки" по электронике, относительно легко программируются и изменяются (дополнения и расширения к микроконтроллерам) . За основу я взял китайский (копия итальянского) МК Arduino (в данном случае Arduino Uno rev. 3, но можно взять и младшего собрата Nano ver.3, если не обременять датчиками и исполнителями). Рис 1. Примерная схема блоков и их взаимодействия модификации Robot-1M (модификация 1)
Фото ультразвуковых датчиков типа HC-SR04 снизу
Фото микроконтроллера Ардуино Уно
Фото блоков реле двигателей (сначала покупной модуль, потом самодельные)
Чтобы защитить датчики УЗ от механического воздействия и боковых помех поместил их в пластик чехол, сделанный из розетки телефонный (убрал внутренности), см. рис внизу
.. Короче все это было спаяно скручено и запрограммировано (о программах, скетчах в следующий раз) и вот, что получилось. Следует далее небольшая фотогалерея (которую потом перенесу в раздел Фото и Видео сайта)
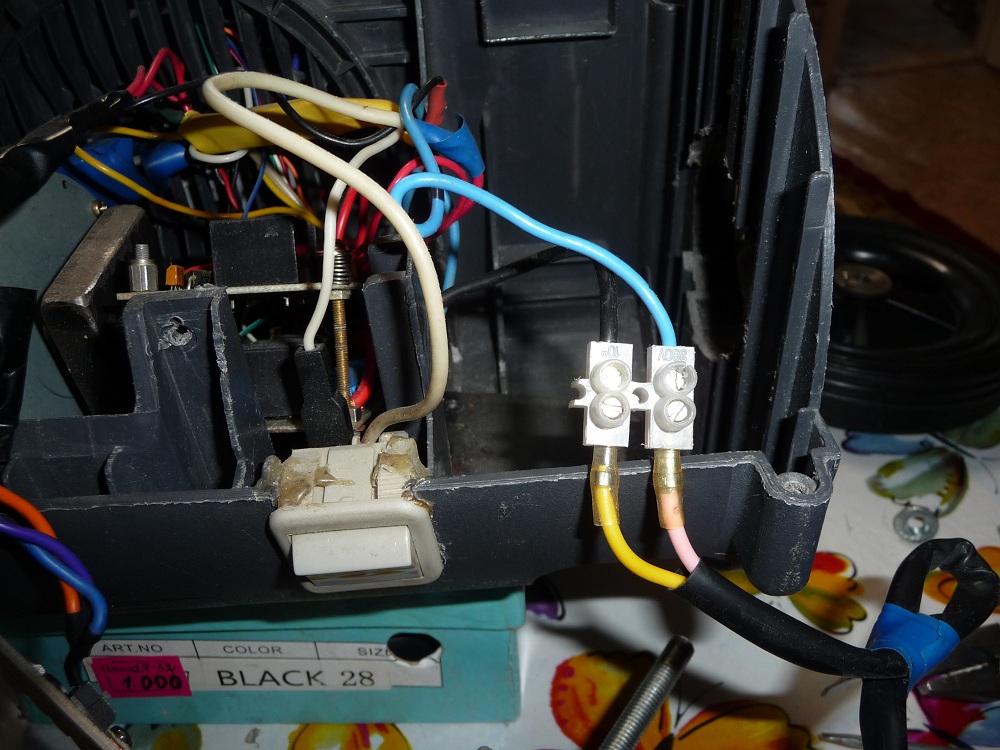
.. фото разборка сзади, с демонтированным правым приводом, колесом Видим блок реле левого и правого приводов и их реверса, двигатель и редуктор левого привода тележки
фото разборки вблизи. Слева на корпусе(его не видно здесь) смонтирован регулятор хода (см. фото далее Робот сзади)
Фото вид Робота спереди (без монтажа УЗ датчиков) Фото вид Робота сбоку (левый) (без монтажа УЗ датчиков)
Фото вид Робота сзади Продолжение о Robot-1M (модификация 1) следует в статье 3. Робот на основе пылесоса и Ардуино - Программное обеспечение (Управление) | |
| Просмотров: 323 | |







| Всего комментариев: 0 | |